量子位 | 嬴徹科技拿下SemanticKITTI榜單兩項第一
2020-12-01
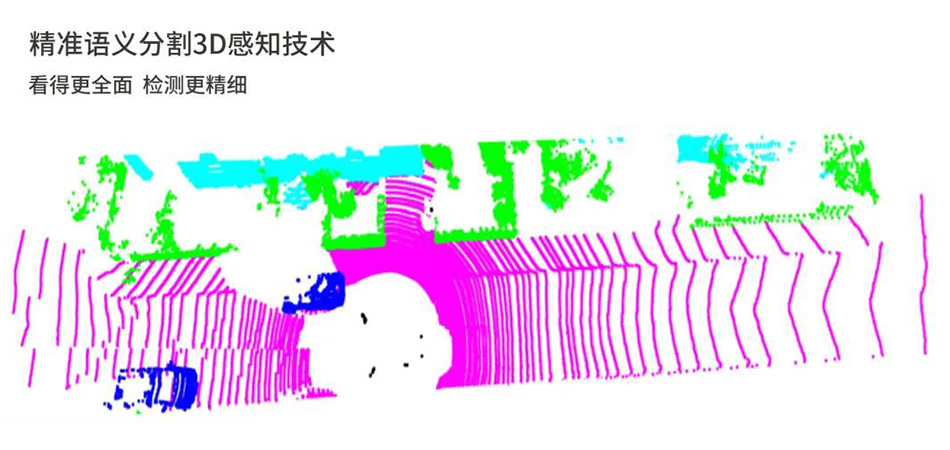
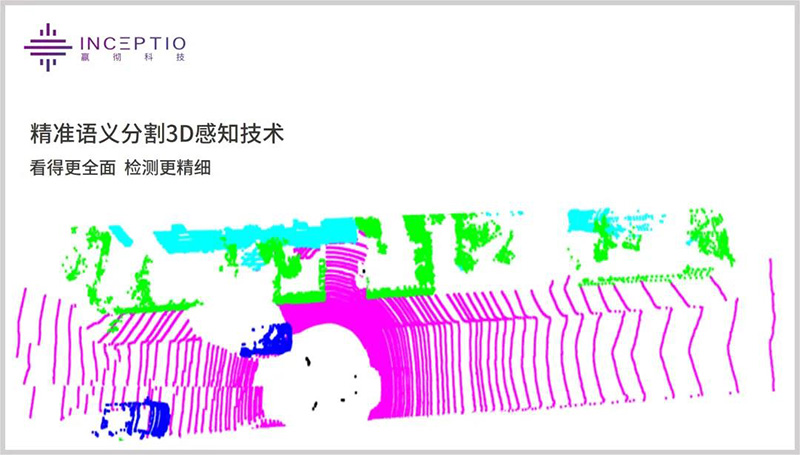
在感知算法領域,嬴徹科技近期憑借「精準語義分割3D感知技術」,在SemanticKITTI 的「語義分割」和「全景語義分割」兩項任務中奪得第一,領先于來自MIT、芝加哥大學、阿里、華為等全球各地的100多支隊伍。
?
語義分割是自動駕駛感知算法的關鍵技術,能識別出各種場景物體,告訴汽車“身邊有什么危險”,從而保障出行安全。
?
KITTI是目前發布最早、影響力最大的自動駕駛算法評測數據集。SemanticKITTI是KITTI在語義分割方向的子數據集,是激光雷達語義分割的重要基準之一。為了推動激光雷達的語義分割研究,SemanticKITTI舉辦了3D語義分割比賽,包括「語義分割」和「全景語義分割」等任務。
?
任務一 「語義分割」,要求能準確識別出場景中的物體類型(如汽車、行人);任務二 「全景語義分割」,要求對場景中的所有物體都進行精確個體級辨識,即類型基礎上,為每個物體賦予1個ID(如1號車、2號車……)。
?
?
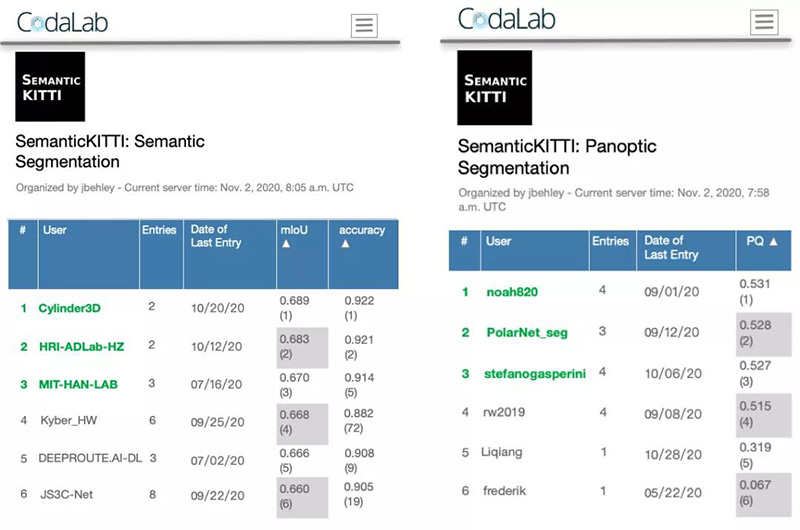
圖1:榜首的Cylinder3D & noah820為來自嬴徹科技的兩支參賽團隊
相較于傳統的激光雷達語義分割算法,嬴徹這次做出了哪些突破?來自嬴徹Inceptio X-Lab的李偉博士,與量子位詳細分享了其中的技術原理。
01 從“劃井字”到“切蛋糕”,使點云分割更均勻
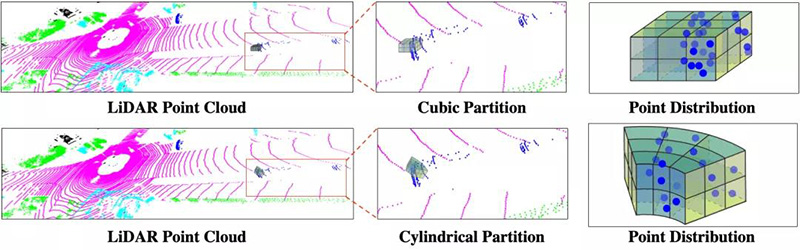
在點云分割上,算法實現了「圓柱坐標系下的體素劃分」。
?
?
李偉博士用“劃井字”和“切蛋糕”,對這一突破進行了類比。傳統激光雷達點云的分割方法,就像是正正經經劃“井”字一樣,將空間劃成多個方塊,但是單個體素塊內的點云就會出現近多遠少、分布不均衡的問題;
?
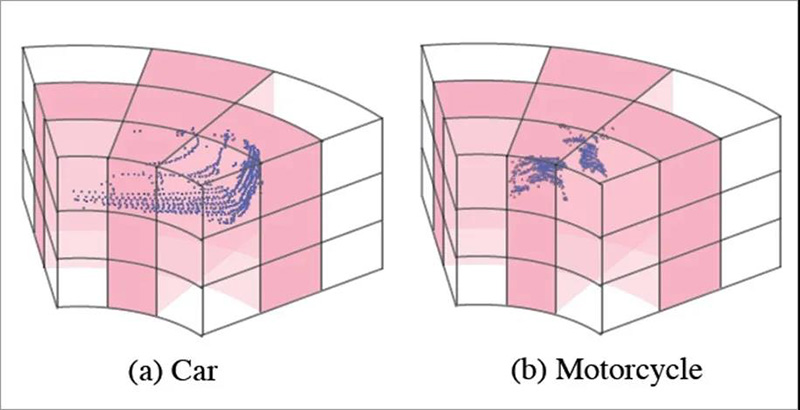
那么,“圓柱坐標系下的體素劃分”,就是從激光雷達扇形掃描的特性出發,即更加符合點云數據的分布特點,以“切蛋糕”的方式進行分區。近處密集的點,單元劃分空間也小;遠處稀疏的點,單元劃分空間就更大,體素塊內點云更均勻。
02 “核骨架增強”,揭開半遮半掩的面紗
做目標檢測的小伙伴們都有過這樣的經歷:一個完整的物體,AI通常都能檢測出來。 然而如果這個物體“遮遮掩掩”,檢測效果就大打折扣。
通過識別這個物體的核骨架(skeleton of the kernel),就能夠撥開面紗檢測出物體。
?
?
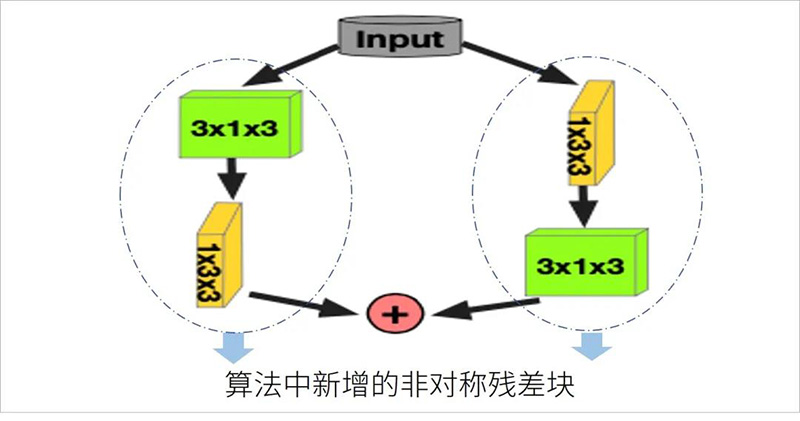
為達到這個目的,在數據處理的部分,算法中新增了「非對稱3維神經網絡模塊」。
這一模塊,在水平和垂直兩個方向分別增強卷積核,能更好地匹配駕駛場景下的物體形狀分布,從多角度更全面地看到每個點云的狀態,即使在遮擋或是稀疏點云輸入的情況下,也能準確地辨別物體。
?
03 從單一劃區到塊點結合,精細區分小物體
區塊檢測是目前常用的方法,缺點是不同類別的點云有可能被劃分到一個體素塊內,物體分割的細節容易丟失,準確性降低。
?
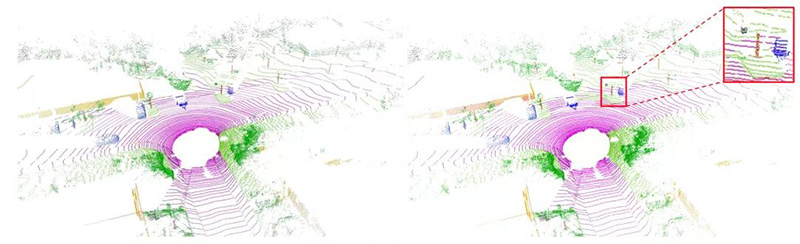
嬴徹在劃區的基礎上,再進行「單個三維點云級別的分割」,獲得精細細節。如下圖所示,嬴徹的方法有效在一個小區域中繼續精確分割出更小的物體。
?
?
塊點結合檢測的效果,不僅辨識精度更高,且更易于小物體的識別,極大地提升了高速行車的安全性。
?
嬴徹此次發布的「精準語義分割3D感知技術」,基于激光雷達的感知算法,與純攝像頭方案形成雙重冗余,滿足在多場景下、尤其是夜晚的感知需求。
?
?
此外,這一算法還能更魯棒、更及時的感知高速公路上突發遇到的小物體,如突然躥出的小動物,從而更及時做出路徑規劃,確保高速行車安全。
?
比賽鏈接:
https://competitions.codalab.org/competitions/24025#results
https://competitions.codalab.org/competitions/20331#results
?
paper鏈接:
https://arxiv.org/abs/2011.10033
https://arxiv.org/abs/2011.11964
?
code鏈接: